
Picture taken by Tao Pang
I am a third-year PhD student at MIT, where I am advised by Prof. Russ Tedrake in the Robot Locomotion Group.
My research aims to scale realistic simulations for generating training data and evaluation benchmarks for robotic manipulation foundation models. I enjoy combining model-based and learning-based methods to tackle this challenge.
Before joining MIT, I completed my MEng at Imperial College London and spent nine months at Ocado Technology, where I worked on parallel yaw pick-and-place systems at scale.
Outside of academia, I am passionate about rock climbing, backpacking, Latin social dancing, and specialty coffee.
News
- Jul 2026 SceneSmith was featured by MIT News and Fox News
- Mar 2026 Gave an invited talk at Toyota Research Institute's ML Speaker Series on "Agentic Scene Generation for Robotic Simulation"
- Oct 2025 Gave an invited talk at the IROS Multimodal Robot Learning in Physical Worlds workshop, watch the recording here
- Sep 2025 Gave an invited talk and participated in a panel discussion at the CoRL Learning to Simulate Robot Worlds workshop
- Aug 2025 Gave an invited talk at TRI on "Achieving Simulation Diversity for Pretraining and Evaluation of Robot Foundation Models"
- Jun 2025 Featured in the MIT CSAIL Student Research Spotlight
- May 2025 Received the Graduate Teaching Award for the MIT Schwarzman College of Computing (presented annually to one faculty member or teaching assistant) for TAing MIT's Robotic Manipulation class
- May 2024 Joined Toyota Research Institute's Large Behavior Models team in Los Altos for an internship
- Sep 2023 Joined the Robot Locomotion Group for my Ph.D.
- Sep 2022 Received the Head of Department's prize from Imperial College London for being the top performing student in my course
Research
Nicholas Pfaff,
Thomas Cohn,
Sergey Zakharov,
Rick Cory,
Russ Tedrake
International Conference on Machine Learning (ICML 2026), Spotlight (top 2.2%)
Website •
ArXiv •
GitHub •
MIT
News •
Fox News
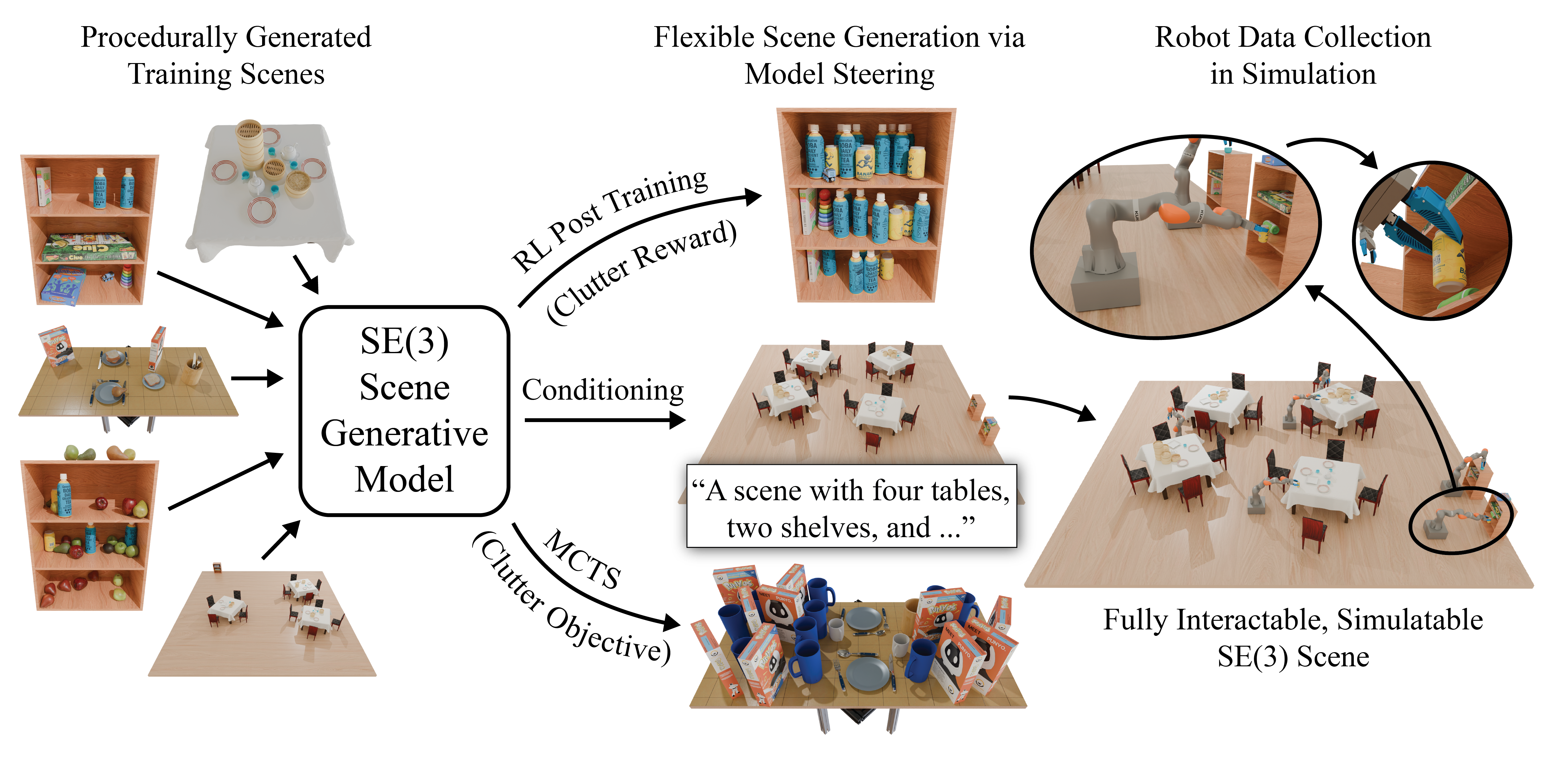 Steerable Scene Generation with Post Training and Inference-Time Search
Steerable Scene Generation with Post Training and Inference-Time Search
Nicholas Pfaff,
Hongkai Dai,
Sergey Zakharov,
Shun Iwase,
Russ Tedrake
Conference on Robot Learning (CoRL 2025)
Best Poster award at RoboGen
Workshop (IROS 2025)
Website •
ArXiv •
GitHub •
News
Coverage
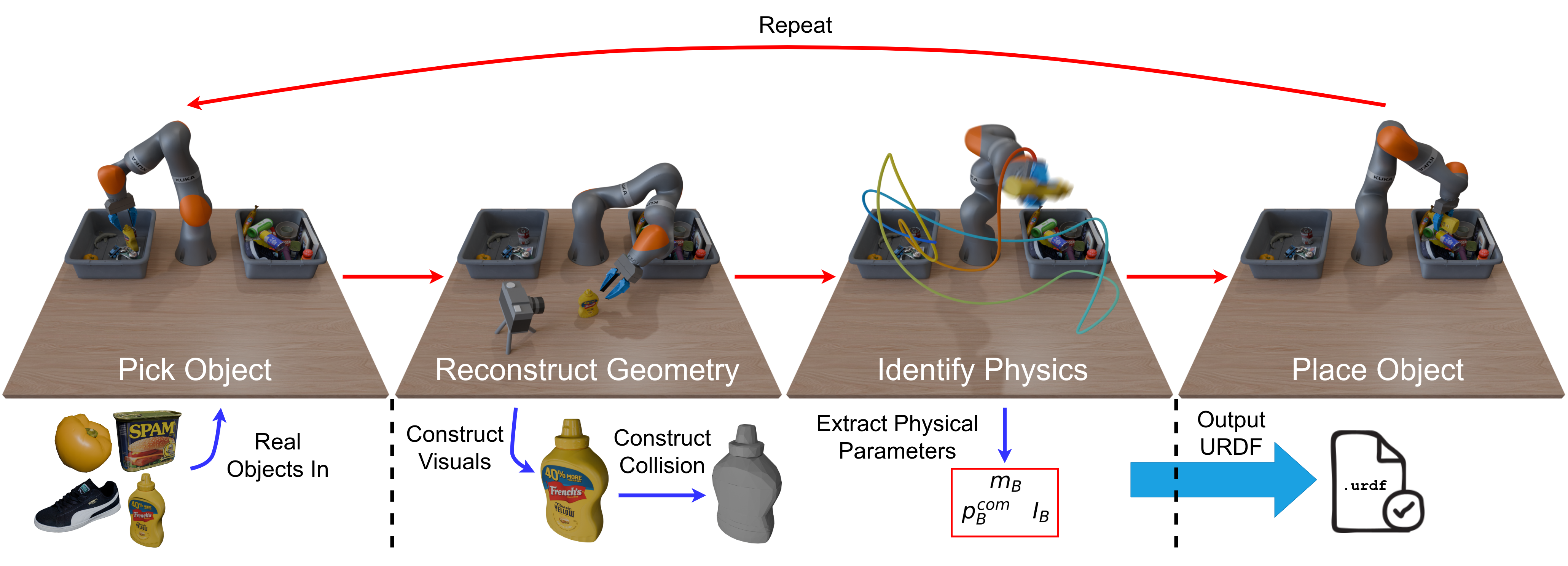 Scalable Real2Sim: Physics-Aware Asset Generation Via Robotic Pick-and-Place Setups
Scalable Real2Sim: Physics-Aware Asset Generation Via Robotic Pick-and-Place Setups
Nicholas Pfaff,
Evelyn Fu,
Jeremy Binagia,
Phillip Isola,
Russ Tedrake
International Conference on Intelligent Robots and Systems (IROS 2025)
New England Manipulation Symposium (NEMS 2025), Oral
Website •
ArXiv •
GitHub
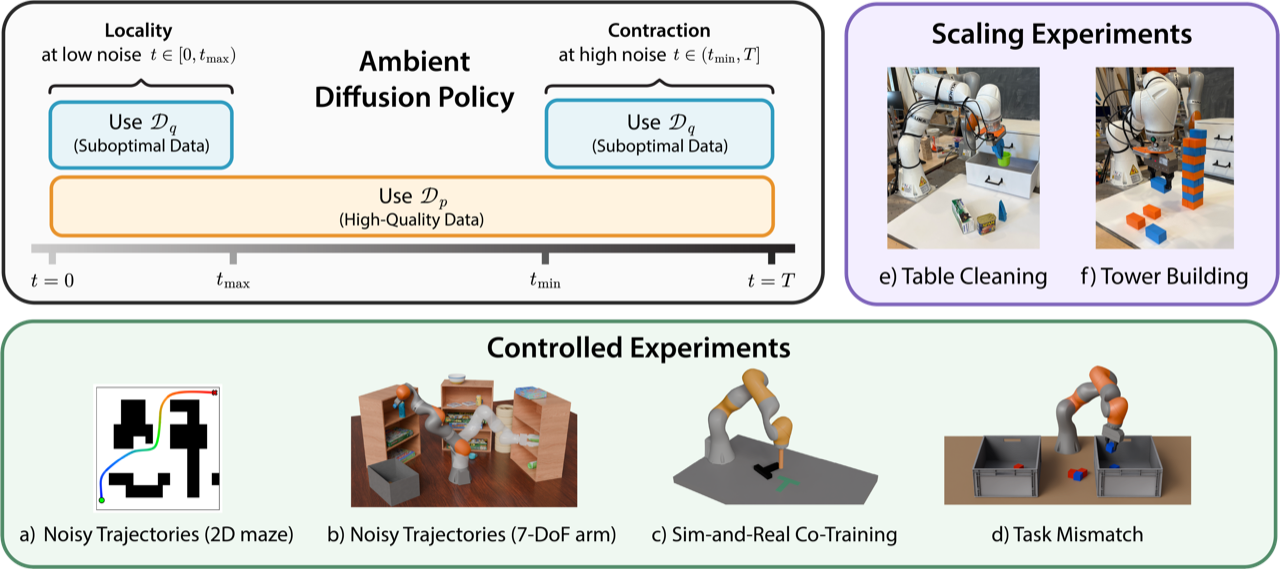 Ambient Diffusion Policy: Imitation Learning from Suboptimal Data in Robotics
Ambient Diffusion Policy: Imitation Learning from Suboptimal Data in Robotics
Adam Wei,
Nicholas Pfaff,
Thomas Cohn,
Arif Kerem Dayı,
Constantinos Daskalakis,
Giannis Daras,
Russ Tedrake
In Submission
Best Paper award at It's the Demos Workshop (RSS 2026)
Best Paper award at Data-Centric Robotics Workshop (RSS 2026)
Website •
ArXiv
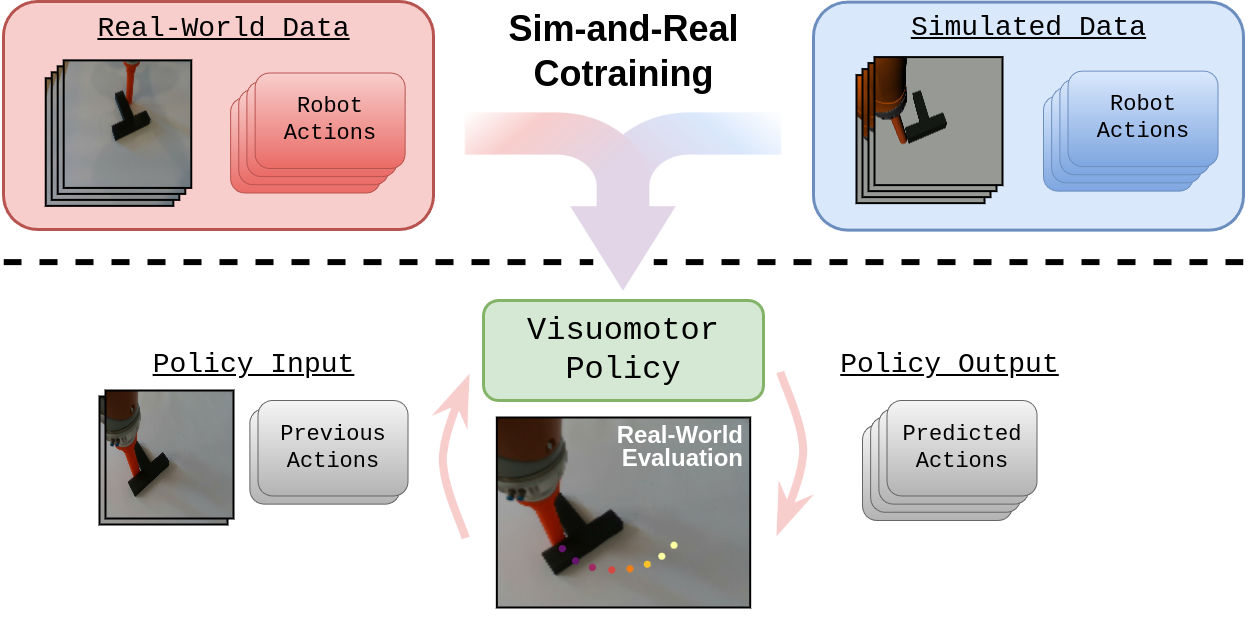 Empirical Analysis of Sim-and-Real Cotraining of Diffusion Policies for Planar Pushing from Pixels
Empirical Analysis of Sim-and-Real Cotraining of Diffusion Policies for Planar Pushing from Pixels
Adam Wei,
Abhinav Agarwal,
Boyuan Chen,
Rohan Bosworth,
Nicholas Pfaff,
Russ Tedrake
International Conference on Intelligent Robots and Systems (IROS 2025)
Website •
ArXiv
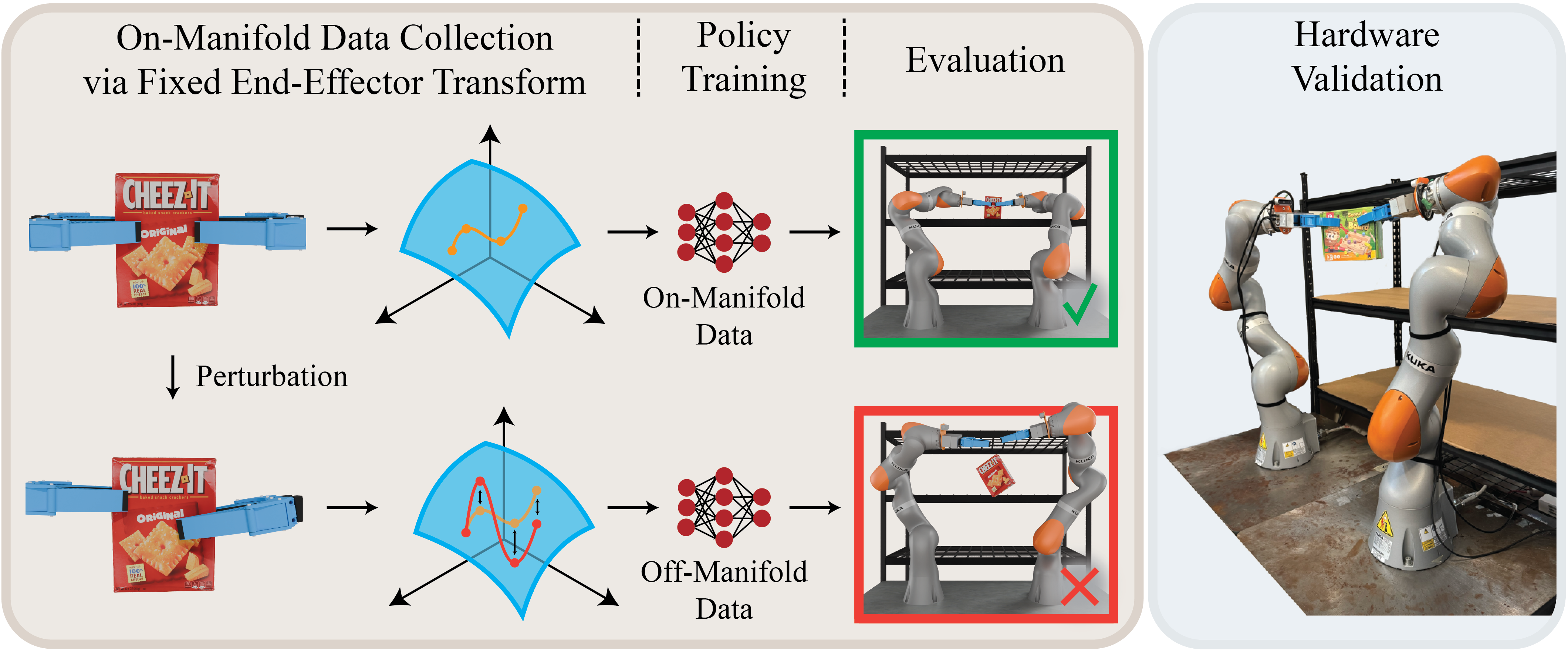 How Well do Diffusion Policies Learn Kinematic Constraint Manifolds?
How Well do Diffusion Policies Learn Kinematic Constraint Manifolds?
Lexi Foland,
Thomas Cohn,
Adam Wei,
Nicholas Pfaff,
Boyuan Chen,
Russ Tedrake
International Conference on Robotics and Automation (ICRA 2026)
Best Poster award at RoDGE
Workshop (IROS 2025)
Website •
ArXiv
Outside the Lab
I enjoy staying active in my free time. These days, that means bouldering several times a week. In the past, I competed in long-distance running, rowing, and Latin social dancing. During holidays, I often trek, backpack, or cycle in different parts of the world.



